
| |
| Goal |
| Background |
| Publication |
| Download |
| Links |
| Background | ||||||||||||||||||||||
Dynamics is considered to be one of the most difficult and non-intuitive courses that engineering students encounter during their undergraduate study because the course combined basic Newtonian physics and various mathematical concepts such as vector algebra, geometry, trigonometry, and calculus and these were applied to dynamical systems. Dynamics is an important engineering course for three reasons. First, it is essential to have a strong grasp of the concepts covered in the course when pursuing a degree in engineering. Second, it is a required course for many engineering departments and is the first engineering course that covers both difficult and abstract concepts. Third, for many capable students this course can become a roadblock to a career in engineering. Haptic interfaces offer greater opportunity to present abstract concepts dynamically to the sense of touch combined with visual feedback in the Virtual Environment. Generally, haptic interface devices serve as special purpose hardware for information input and output with computers. Our sense of touch is an active, informative and useful perceptual system and it is the only human sense that enables us to modify and manipulate the world around us. It was suggested that something touched is more real than something seen
The function of this project is to integrate haptic-augmented Virtual Environment technology into the course of ‘Dynamics’ for the undergraduate engineering students at Lamar University. We identified the following exemplary Dynamics problems as shown in Table 1. Table 1 Concepts and Exemplary Problems
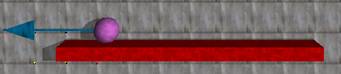
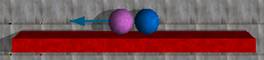
Problem 1: Sliding and Rolling Motion
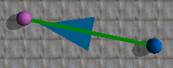
Problem 4: Coriolis acceleration and force
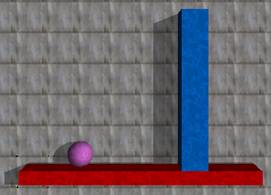
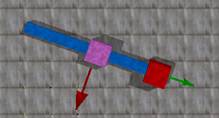
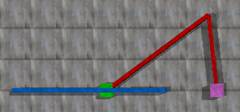
Problem 5: Kinetics of Rigid Body This demo shows the slider-crank mechanism of an internal combustion engine. Generally speaking, there are three types of planar motion: 1) linear translation; 2) rotation; 3) combined translation and rotation in a plane. In a slider-crank mechanism, the slider is moving at linear translational motion; the link BC is at rotational motion; the link AB is at combined translational and rotational motion. In this case, the slider is actually the piston of a car engine and it drives the crank and wheel (not drawn in this figure). One can drag the slider to move the mechanism with a haptic device.
|
||||||||||||||||||||||



Acknowledgment: Partial support for this work was provided by the National Science Foundation's Course, Curriculum, and Laboratory Improvement (CCLI) program under Award No. 0737173 to Drs. W. Zhu, K. Aung, J. Zhou and M. Srinivasan. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.